Hamilton Standard Super-Hydromatic Propellers
Part 2: Mechanical Descriptions
by Tom Fey
Published 11 Jun 2018; Revised 27 Oct 2023
The following analysis of the Super-Hydromatic is based on a one diagram from 1942, a handful of US Army Air Corps Progress reports including a general mechanical description of the propeller, a few dozen photographs of the Super-Hydromatic on the aircraft they propelled, an Erection and Maintenance Handbook for the XB-35, and recently discovered photographs of surviving Super-Hydromatic propeller blades. In addition to the paucity of detailed information, the photographic record indicates there were at least two versions of the dual rotation Super-Hydromatic, with very little photographic information on the single rotation variant. Any errors in fact or supposition are entirely my own.
The Single Rotation Super-Hydromatic Model 4260 Propeller
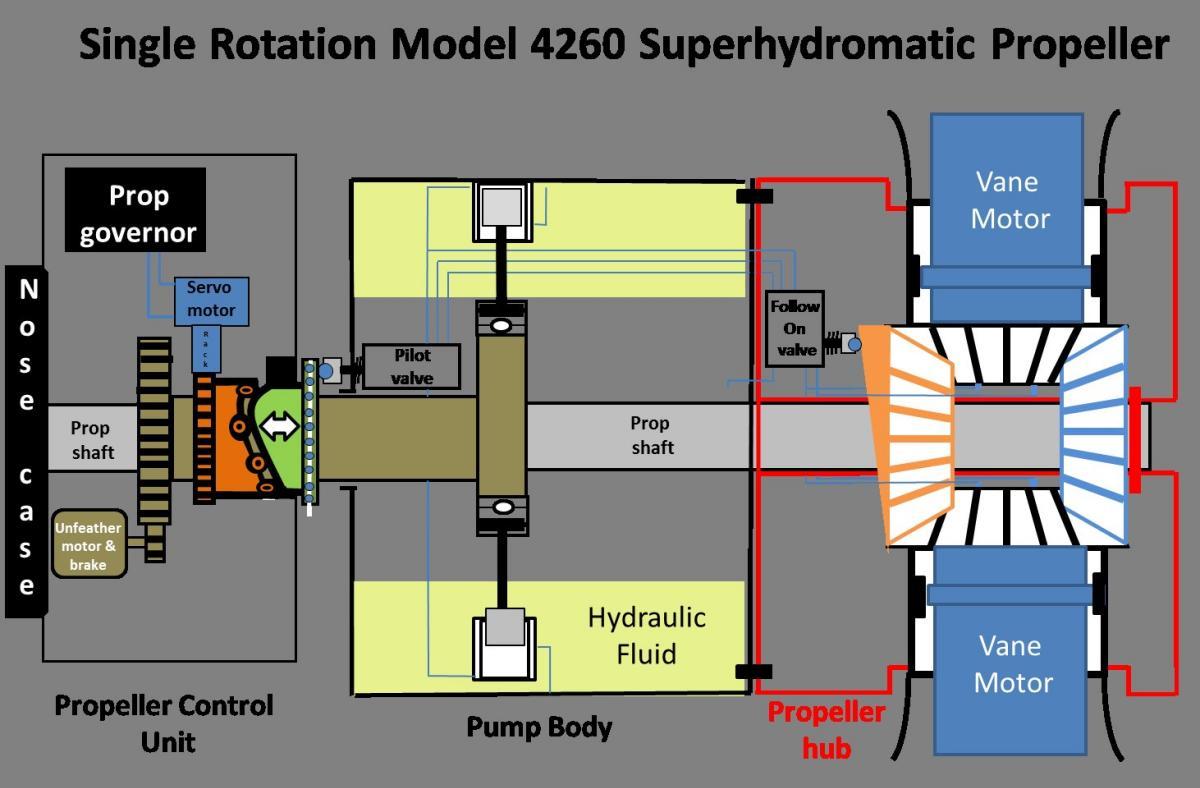
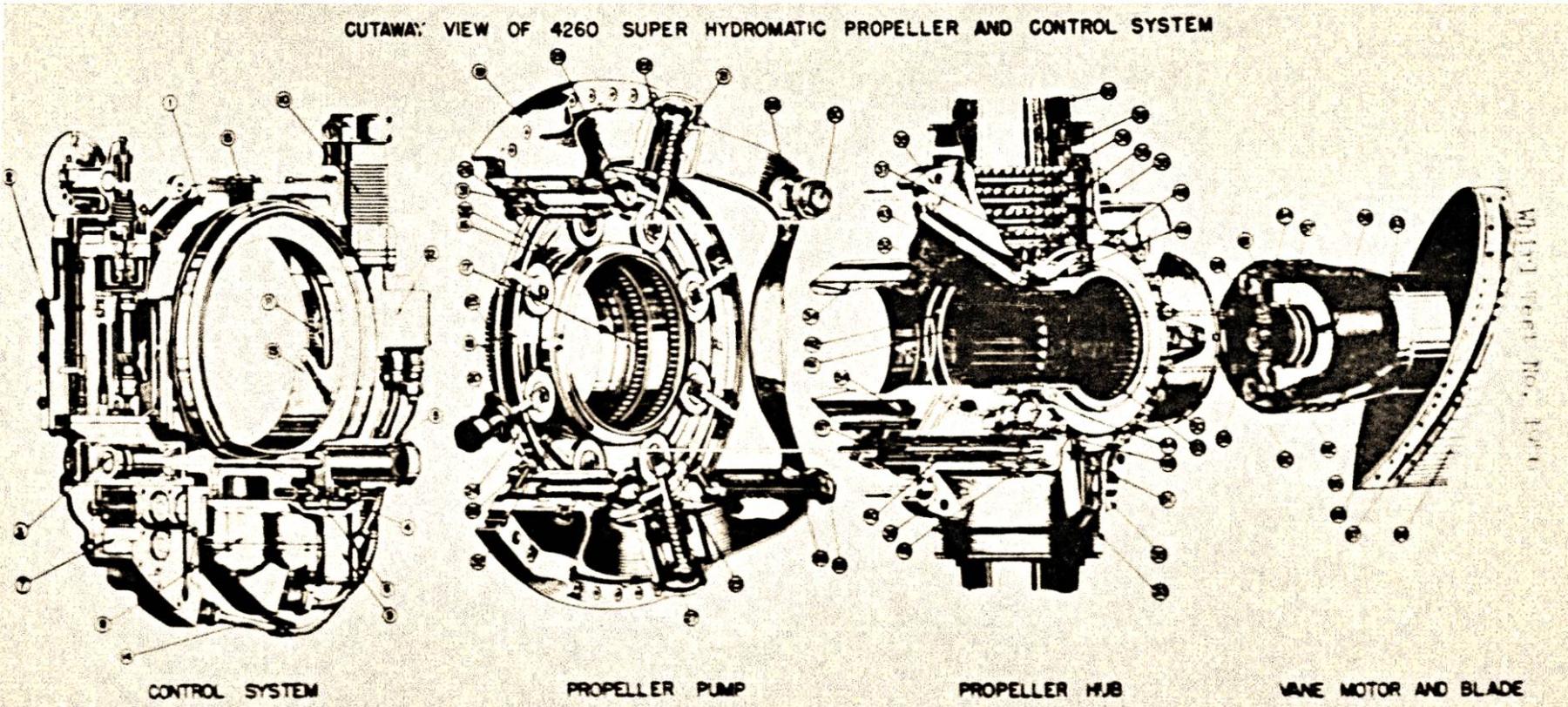
The Super-Hydromatic is composed of three main assemblies: the propeller control unit (PCU), the pump body, and the propeller hub with propeller blades and vane motors.
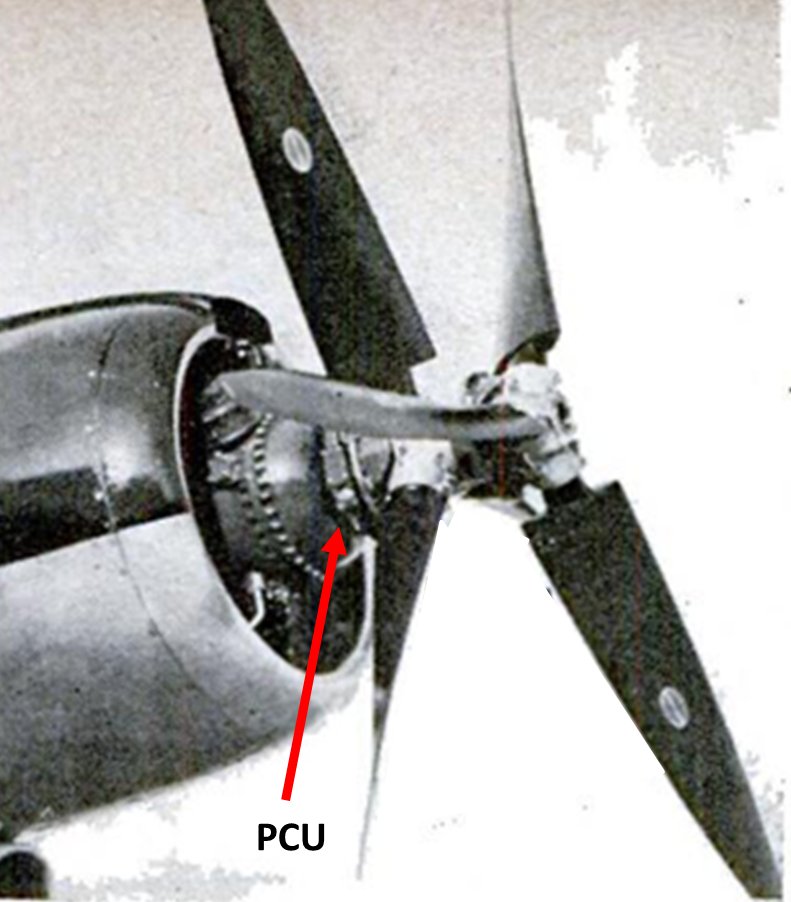
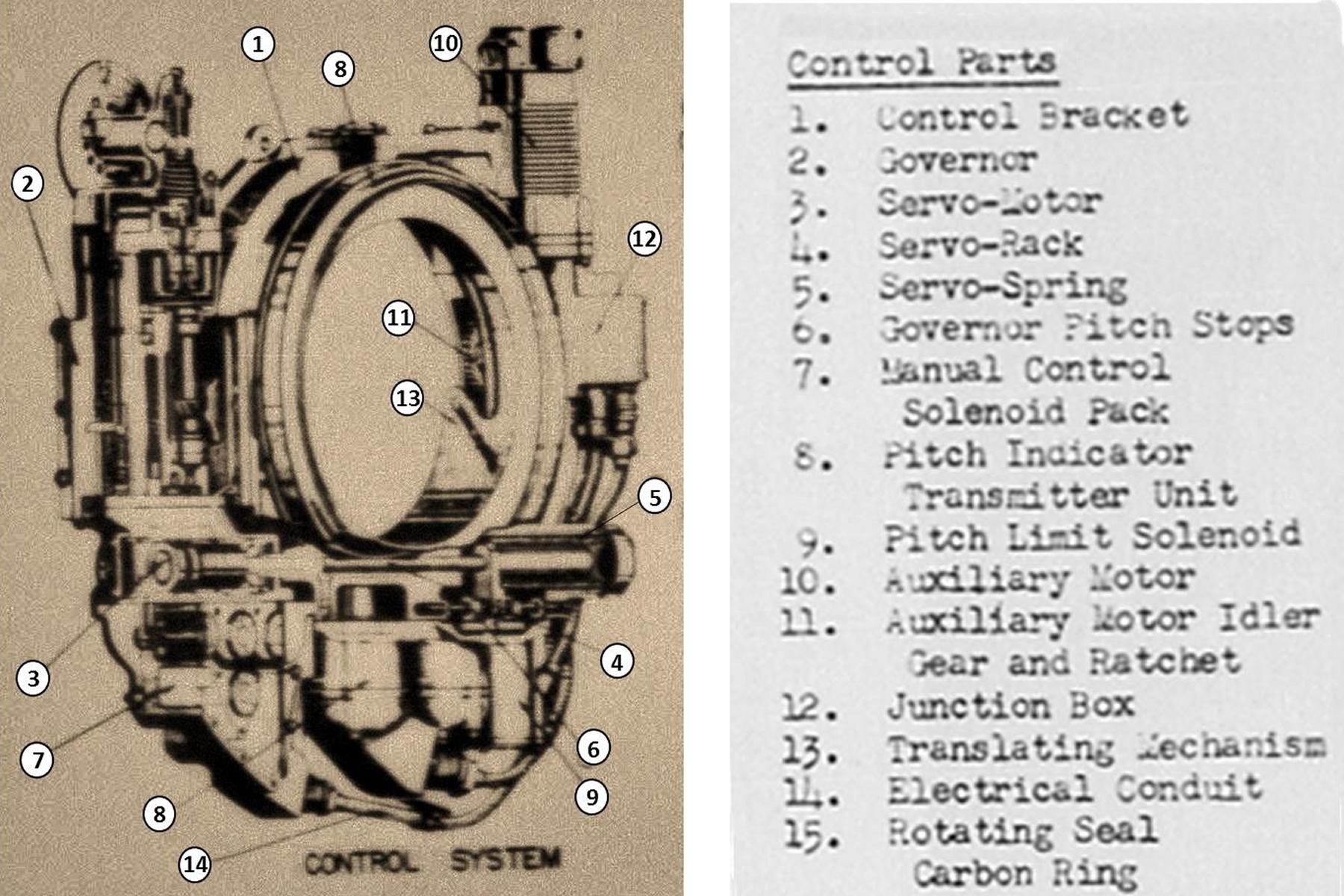
The PCU is circular in configuration and is bolted to the thrust plate of the engine, tucked between the aft face of the propeller assembly and the nose case (Fig. 7). It contains a modified Woodward propeller governor with an 8-ounce oil supply independent of the engine oil system. In addition, the PCU contains four solenoids: one for locking blade pitch, a second for manually commanding and increase in blade pitch, the third for manually commanding a decrease in blade pitch, and the fourth for removing the pitch stops to allow feathering and reversing of the propeller. The last component of the PCU is an electric accessory motor used for unfeathering the propeller
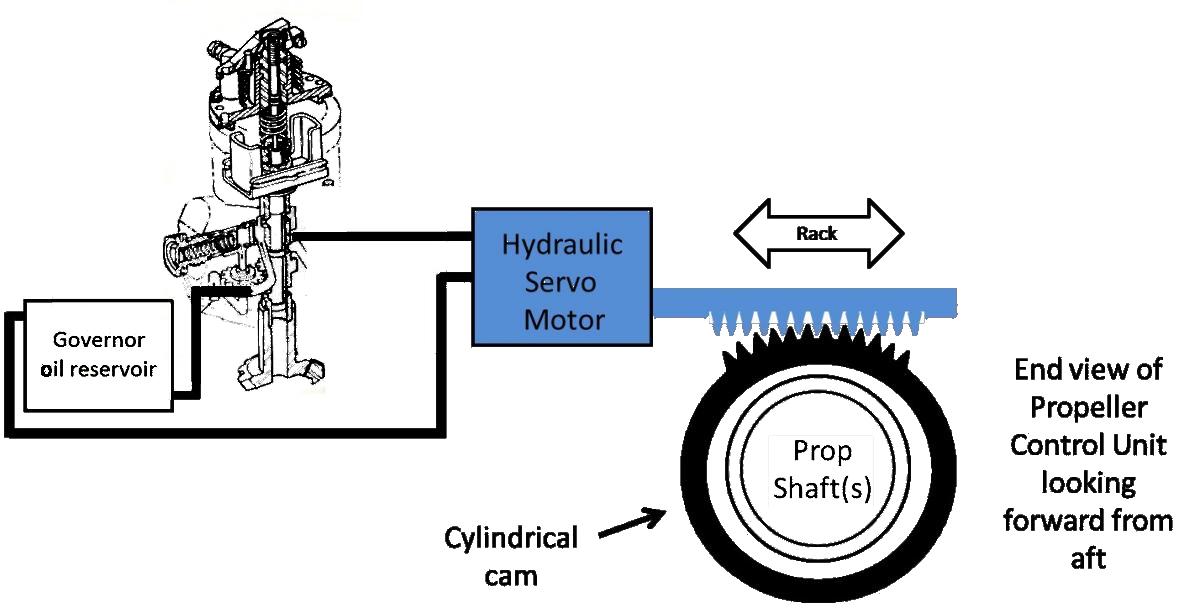
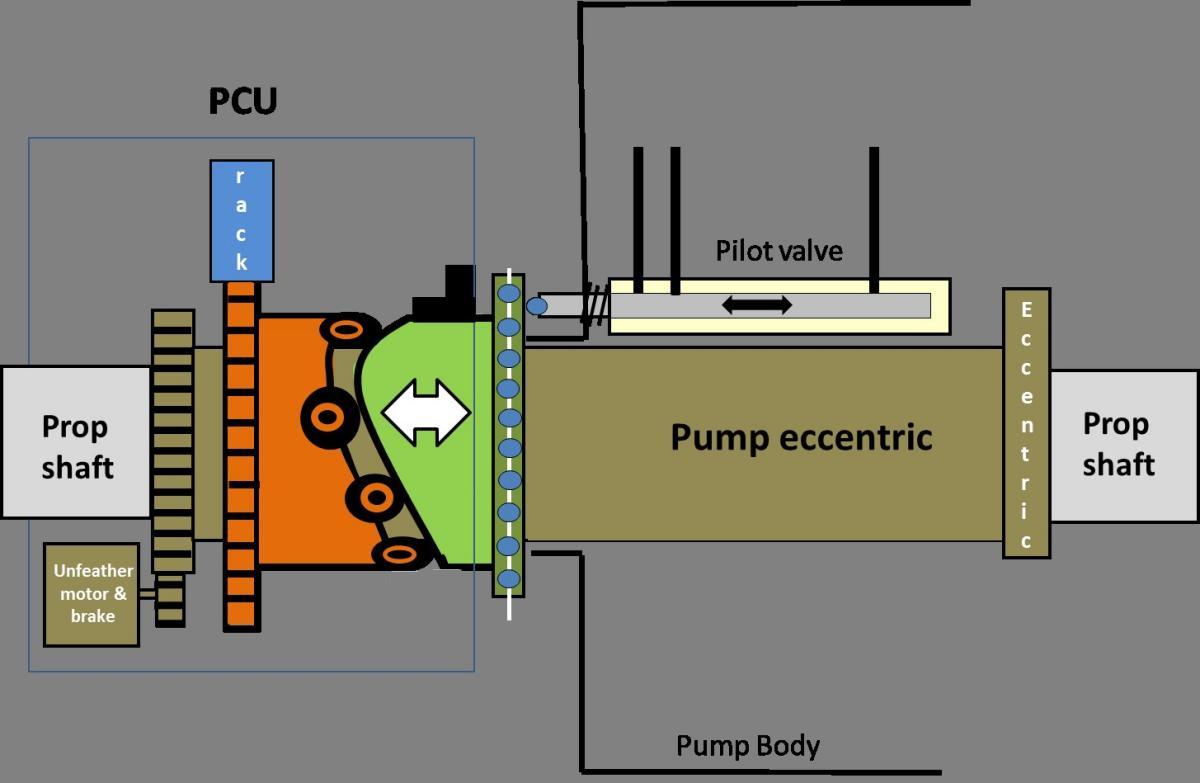
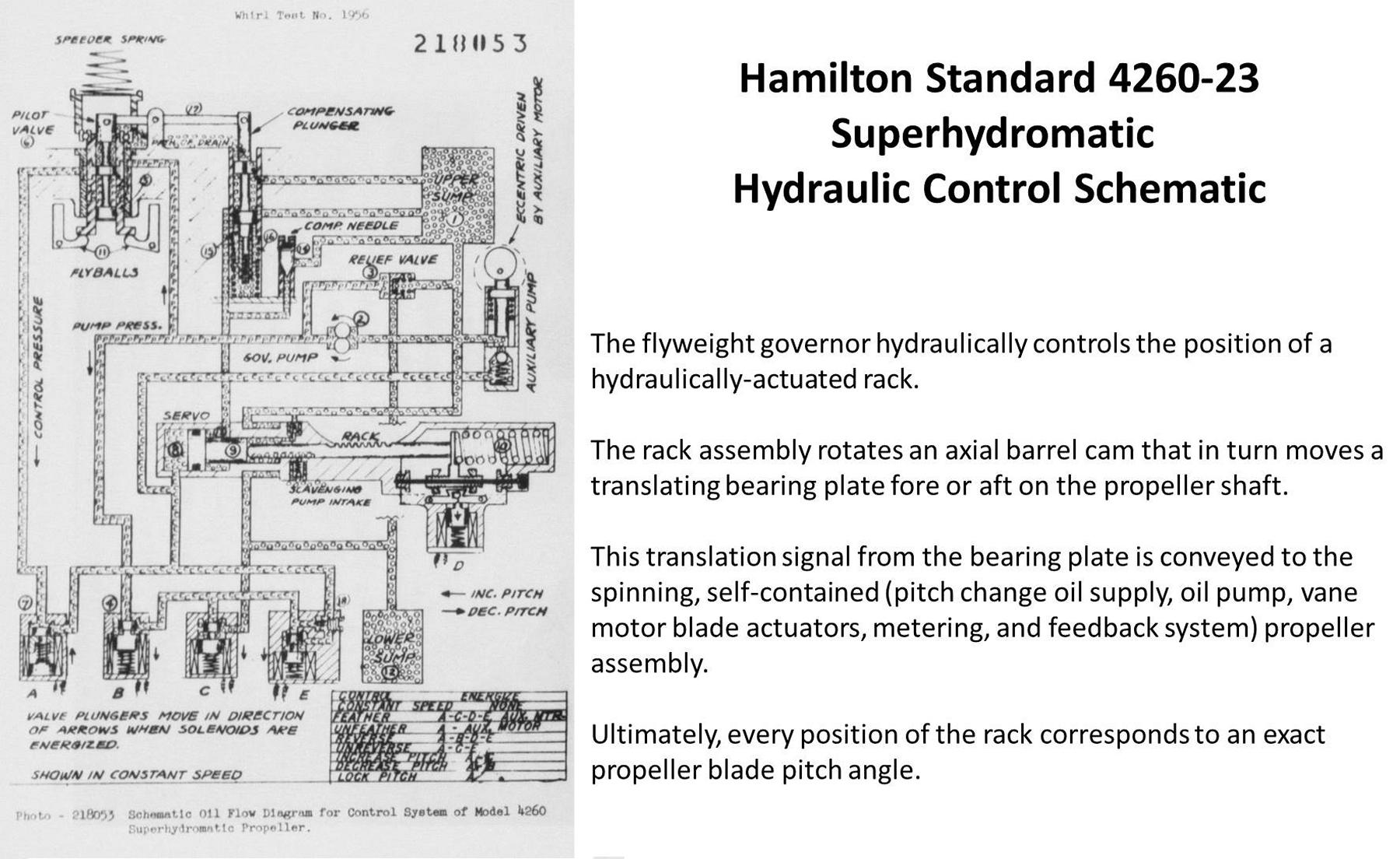
Referring to the diagram the modified Woodward governor regulates a servo motor that moves a spring-resisted toothed rack positioned at right angles to the propeller shaft. This rack engages teeth machined onto a cylindrical cam such that movement of the rack rotates the cam (Fig. 8).
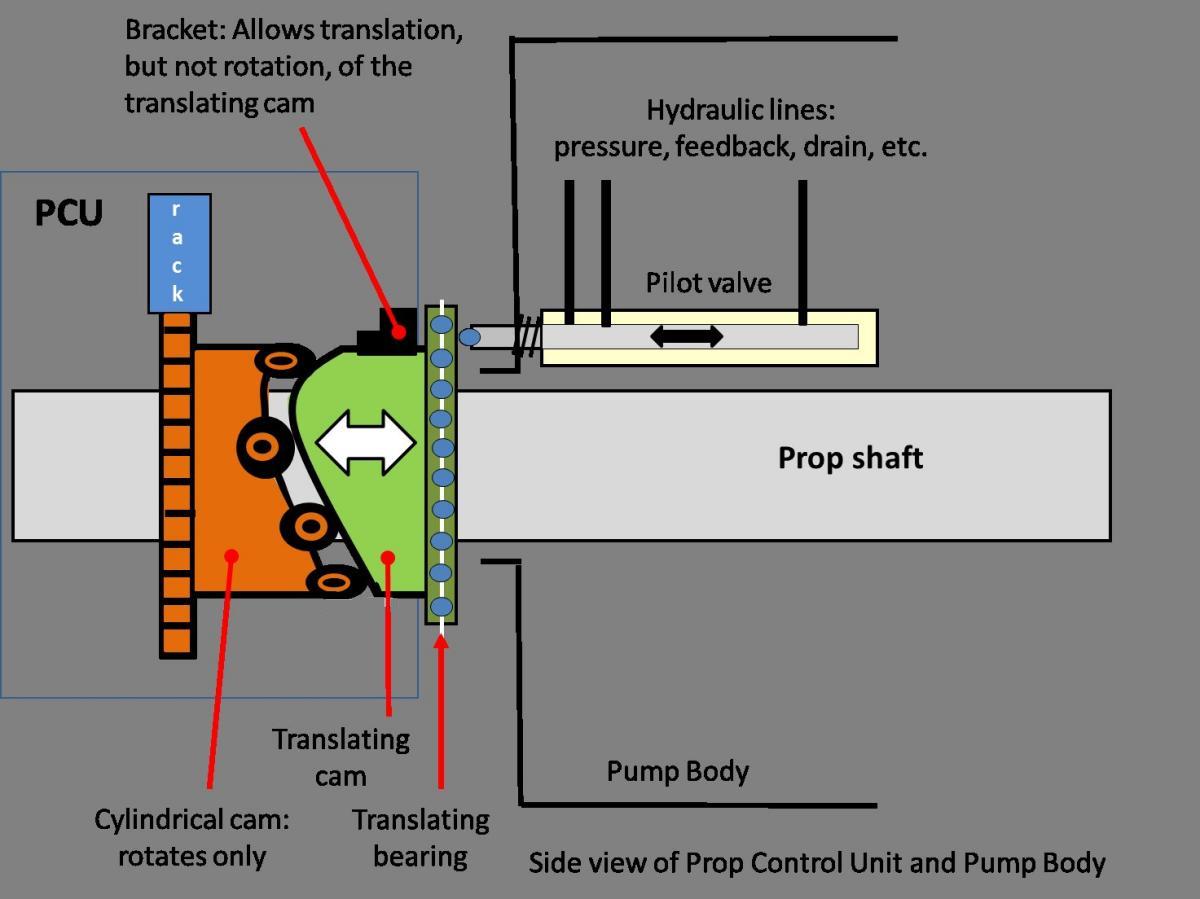
The cylindrical cam is opposed by an inversely-shaped cam assembly (translating cam) in the propeller pump body, however this translating cam is splined in place by the PCU, thus does not rotate with the propeller assemblies; it only translates fore and aft coaxial with the propeller shaft. There are roller elements on the cylindrical cam where it interfaces with the translating cam. The rotation of the cylindrical cam is transformed by the translating cam into a fore and aft motion of the translating cam assembly. This is how a pitch change signal is transmitted into the rotating propeller assembly. Every position of the translating cam corresponds to a specific blade pitch setting (Fig. 9).
|
|
|
|
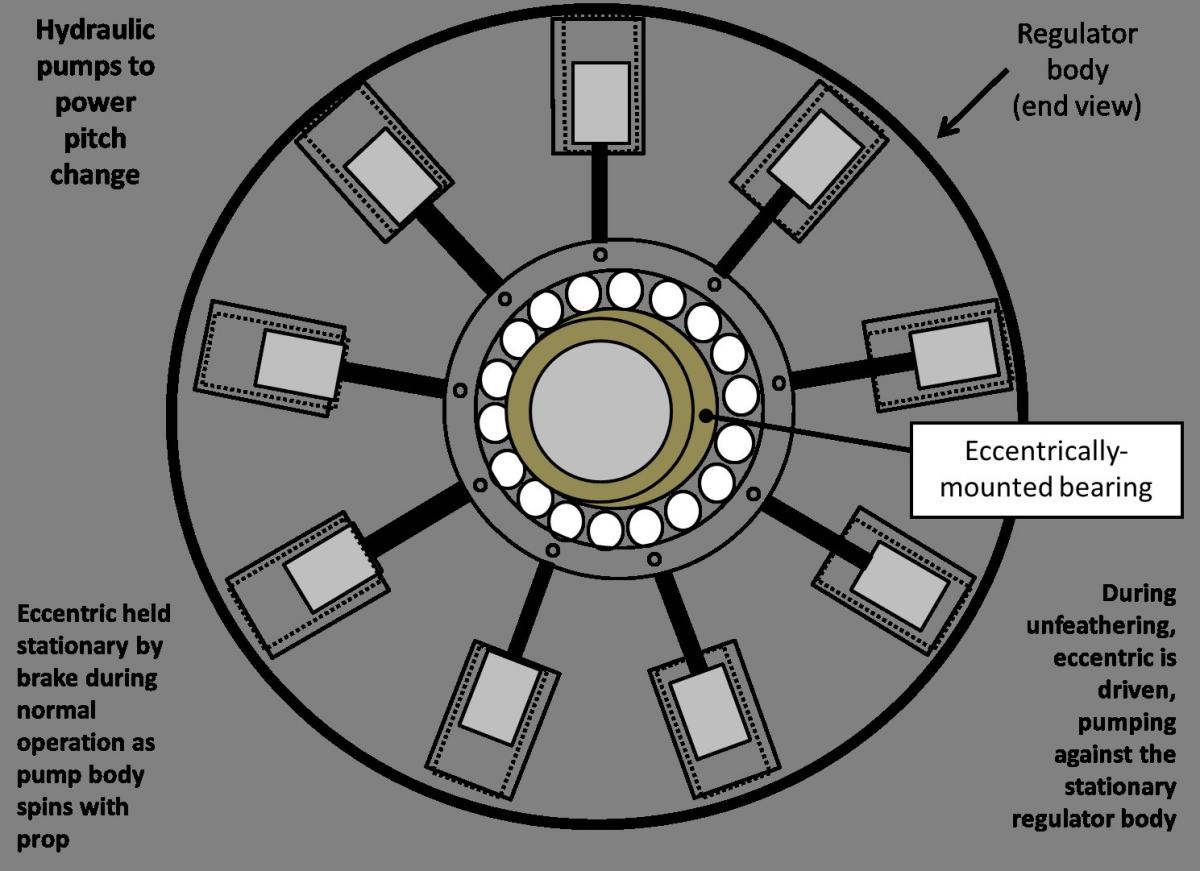
| Fig. 7. Hamilton Standard Super-Hydromatic propeller set on the modified, R-2800 powered Douglas B-23 test aircraft. Note the annular Propeller Control Unit (PCU) nestled between the nose case and the propeller. | Fig. 8. The Super-Hydromatic propeller governor controlling a servo motor driven rack that rotates a cylindrical cam, providing an axial mechanical signal to control the pitch of the inboard propeller. | Fig. 9. The Super-Hydromatic pitch-signaling train. Rack rotates cylindrical cam, cylindrical cam moves a translation bearing axially on the propeller shaft, and a servo valve in the spinning propeller body receives the mechanical axial signal and converts it into a hydraulic signal to change propeller pitch. | Fig. 10. The Super-Hydromatic hydraulic pump configuration. Similar to a rotary engine, the eccentric is held stationary while the bearing-mounted rods, pistons, and cylinders rotate with the propeller/pump body around the eccentric to pressurize hydraulic fluid. During operation, fluid is thrown outward by centrifugal force to supply the pumps. |
The translating cam drives a translation bearing fore and aft, and the hydraulic pilot valve rides on the outboard race of the translation bearing. The pilot valve is integral with, and thus rotates with, the propeller assembly. The movement of the translation bearing actuates the pilot valve, transmitting a pitch change signal to the rotating propeller. The pilot valve controls the movement of, and receives feedback from the "follow up" hydraulic valve slaved to the base of the propeller blade. The follow up valve will be discussed in due course.
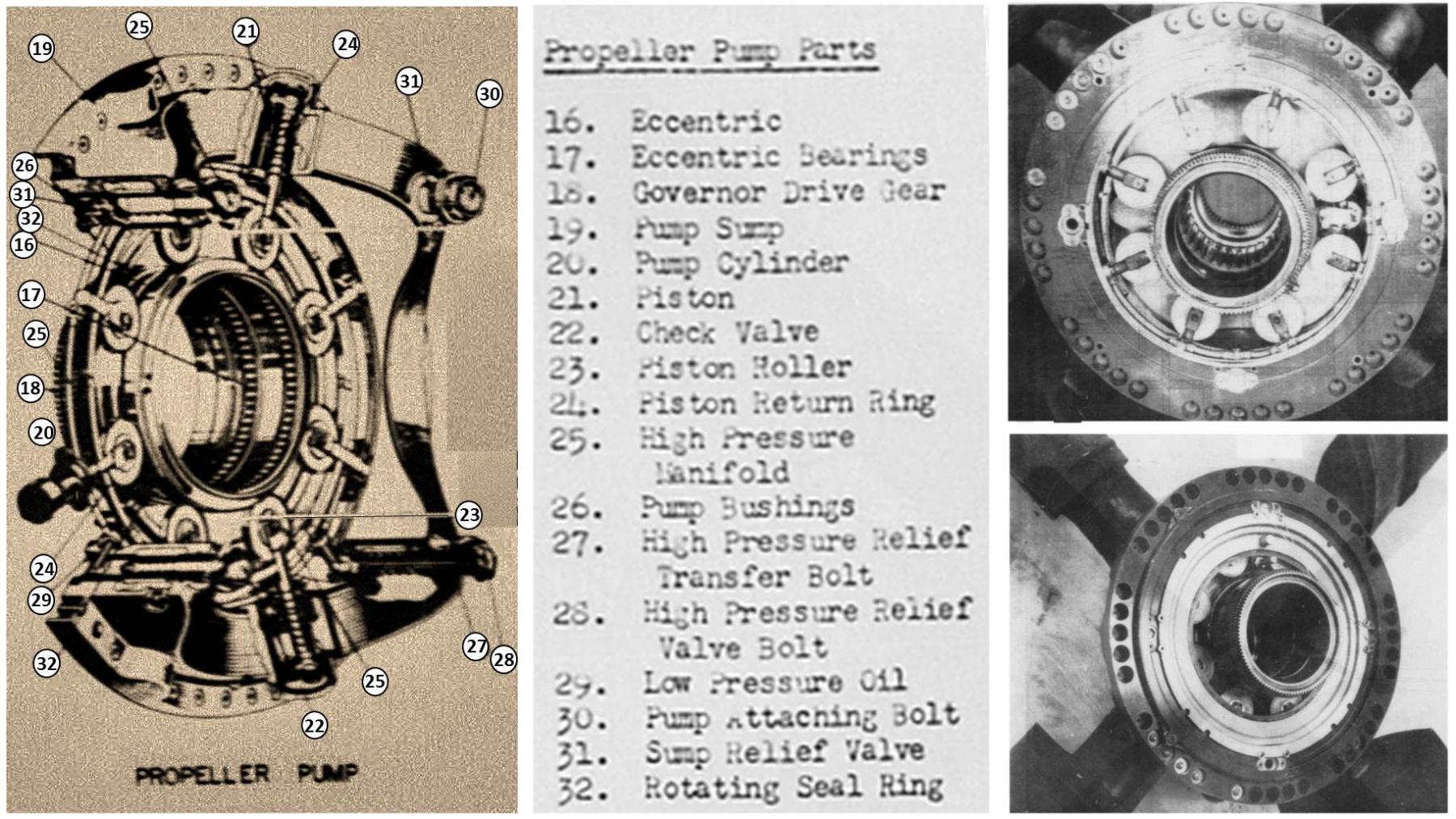
So where does the Super-Hydromatic obtain hydraulic power to turn the propeller blades on their axis? The answer is a radial-type, multi-cylinder, hydraulic pump located in the pump body (Fig. 10). The configuration is not unlike a rotary engine. The link rods and with pistons ride on a large bearing that encircles an eccentric at the center of the pump body. The eccentric is a concentric sleeve located between the propeller shaft and cylindrical cam and translating cam assemblies. It is held stationary by the (braked) unfeathering motor, and the link rods, pistons, pump cylinders, and pump body orbit around the locked eccentric. The pump body is partially filled with hydraulic fluid, and centrifugal force of the rotating pump body throws hydraulic fluid outward to feed the intakes of the hydraulic pumps (Fig. 11). There can be up to nine individual pump assemblies, each with a cylinder bore of 0.500", a stroke of 0.375", and an operational pump/prop maximum of approximately 1,500 rpm.
The Super-Hydromatic ran on an extraordinary 3,000 psi fluid pressure, and the propeller was designed to have very rapid pitch change, which necessitates large volume flows of hydraulic fluid. The inspired design of the radial pump satisfies both criteria; small diameter hydraulic pump cylinders and pistons to provide the high pressure, and a large number of pumps to supply the required flow volumes.
But how do you unfeather a stationary propeller with a design that requires rotation to provide hydraulic power? That is where the unfeathering motor comes in. To unfeather the propeller, the external electric motor drives the eccentric upon which the pump assembly rides, providing the pressure and fluid volume to turn the blades and get the propeller assembly windmilling. Once the prop is windmilling, the unfeathering motor is deactivated and once again locked in place by a brake (Fig. 11).
Now back to the pilot and follow up valves. The pilot valve senses the position of the translating cam and in turn opens or closes channels that control hydraulic fluid flow to the follow up valve. The follow up valve is a larger, balanced, more robust valve that controls the flow of high pressure fluid from the pump(s) to one side of the other of the vane motors tucked inside the base of each propeller blade. As the blades move to a new pitch, that motion is conveyed hydraulically or mechanically to the follow up valve and hydraulically from the follow up valve back to the pilot valve, to stop the blade rotation at the commanded pitch (Fig. 12).
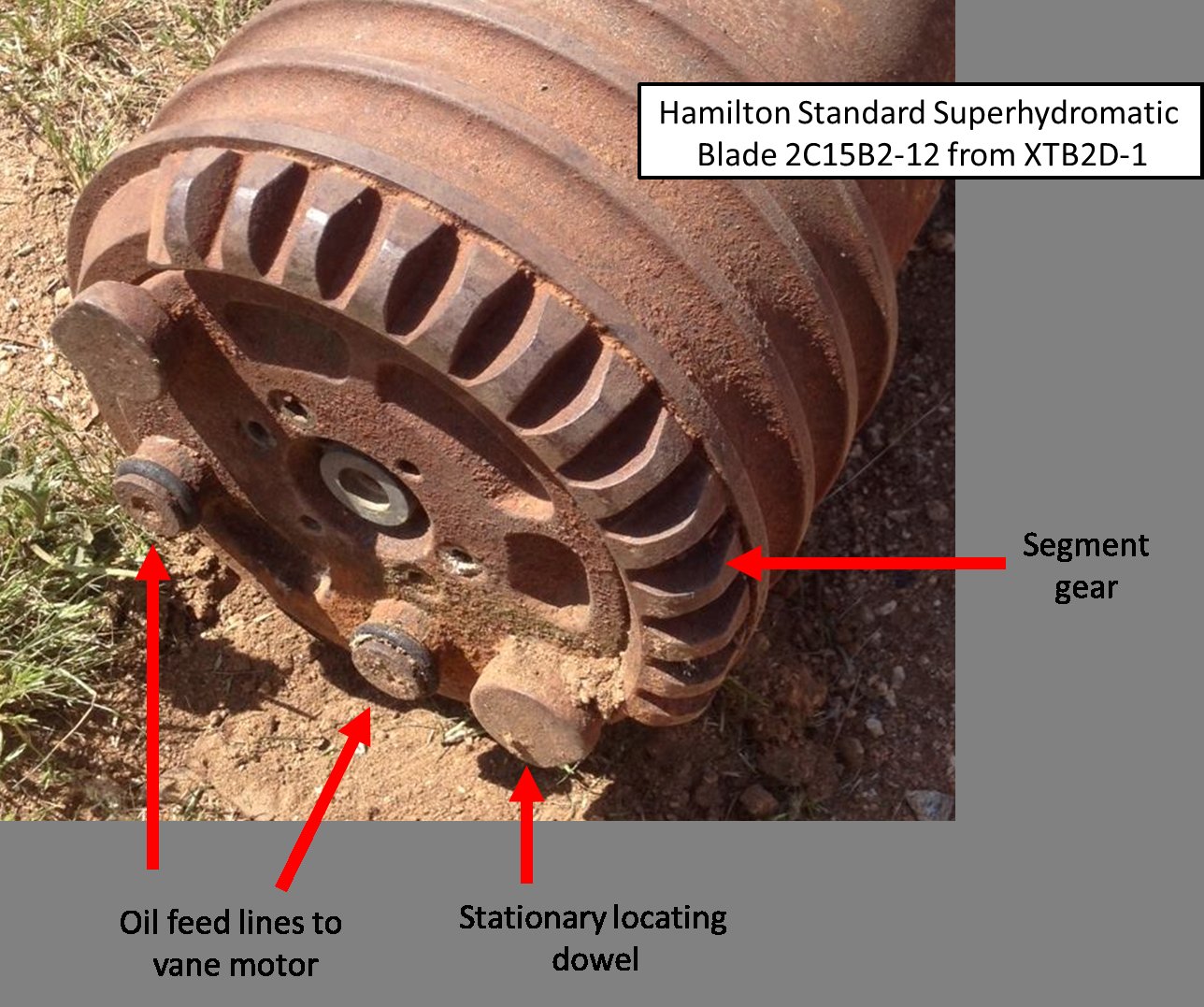
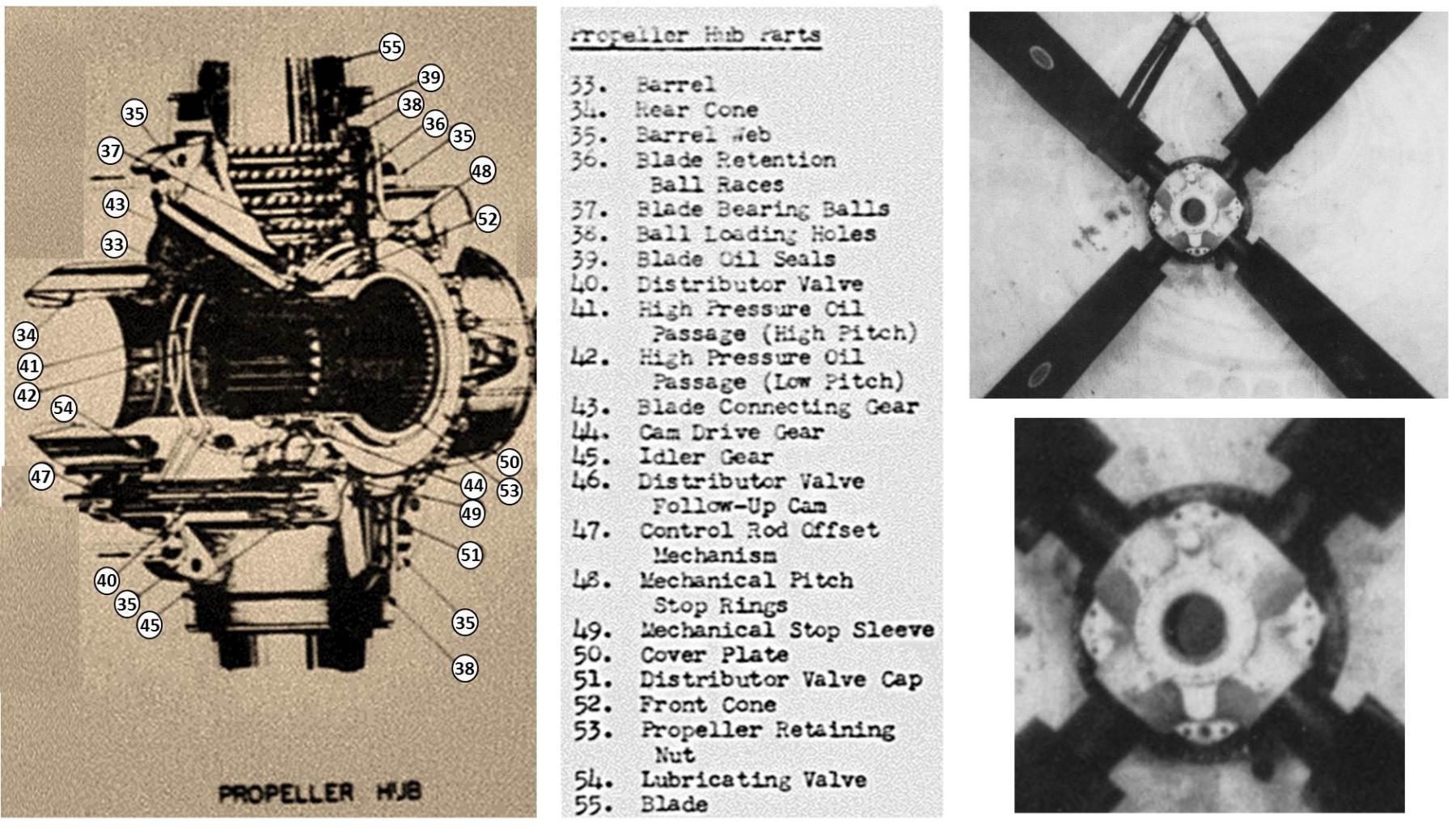
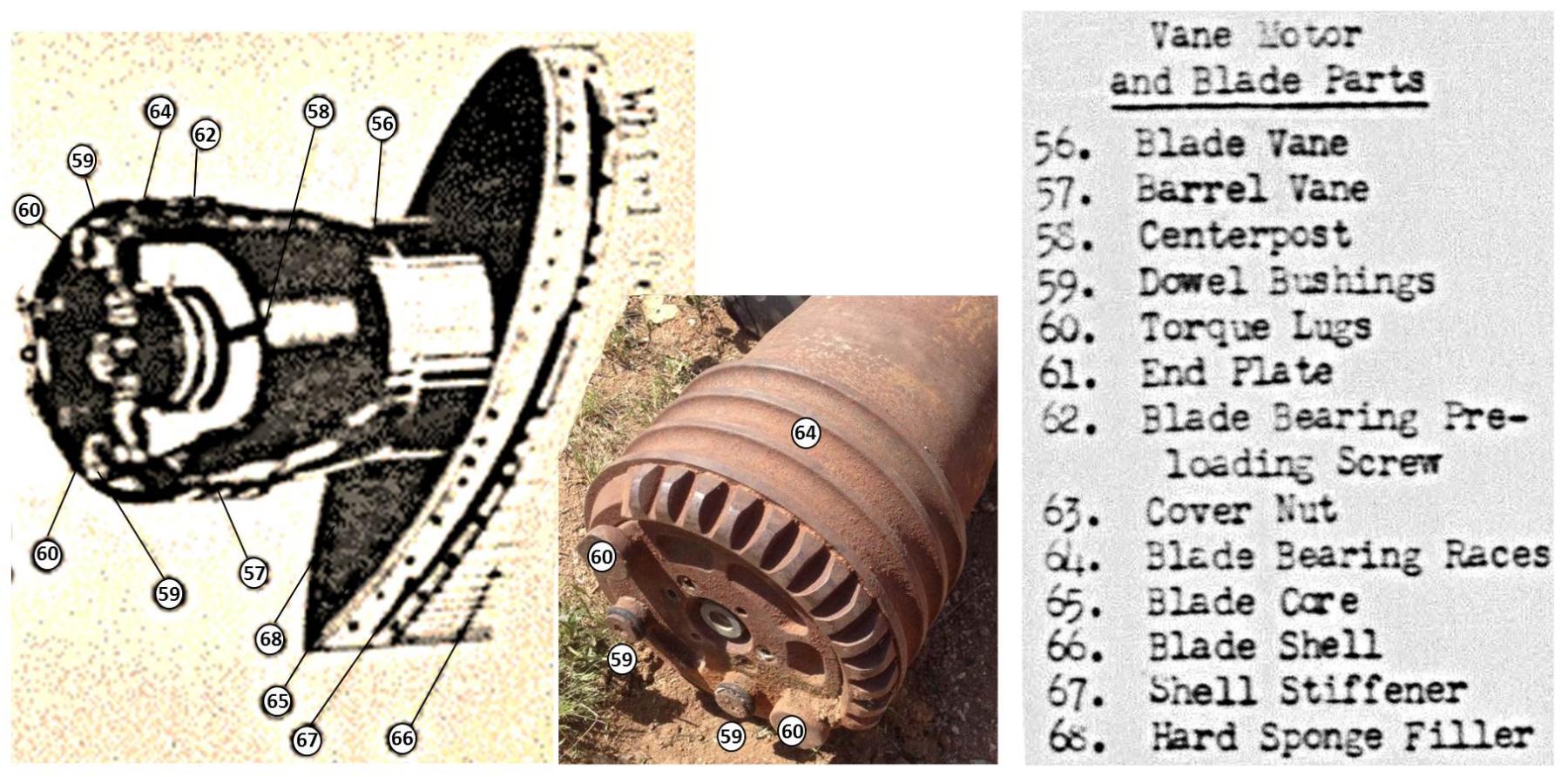
To turn the propeller blades on their axis in the hub, each of the hollow steel blades had a hydraulic vane motor assembly slipped into the open root of the propeller(Fig. 13). Internal splines (120 of them) were machined into the bore of the propeller to mate with external splines on the vane motor assembly (Fig. 14). A segment gear attached to the splined, rotating external housing of the vane motor meshes with a circular synchronizing gear to coordinate the movement of all the propeller blades in the hub. Interestingly, the synchronizing gear was composed of three segments with apparently very fine gear teeth that allowed individual blade pitch to be adjusted down to 0.06° to accommodate manufacturing or aerodynamic differences among the blades.
 |
 |
 |
 |
| Fig. 11. The concentric Super-Hydromatic pitch-signaling and pressure generating assemblies in the pump body. The pump eccentric spool is held fixed by when the unfeathering motor is braked during normal operation while the pump body and assemblies rotate around the fixed eccentric. For unfeathering, the unfeathering motor spins the eccentric spool inside the stationary body/prop, generating hydraulic pressure. The blades move to the commanded pitch and windmill the engine. | Fig. 12. Representation of the single rotation Model 4260 Super-Hydromatic propeller. | Fig. 13. Propeller base of a 2C15B2-12 Super-Hydromatic propeller blade used on the Douglas XTB2D-1 Skypirate. The vane motor is inserted in the hollow base of the propeller. The vane motor hydraulic supply nipples can be seen with rubber O-rings still on them. The external housing of the vane motor engages internal splines on the prop blade, and the segment gear is integral to the external housing of the vane motor. | Fig. 14. Hollow base of the Super-Hydromatic showing the 120 engagement splines that mesh with the vane motor. |
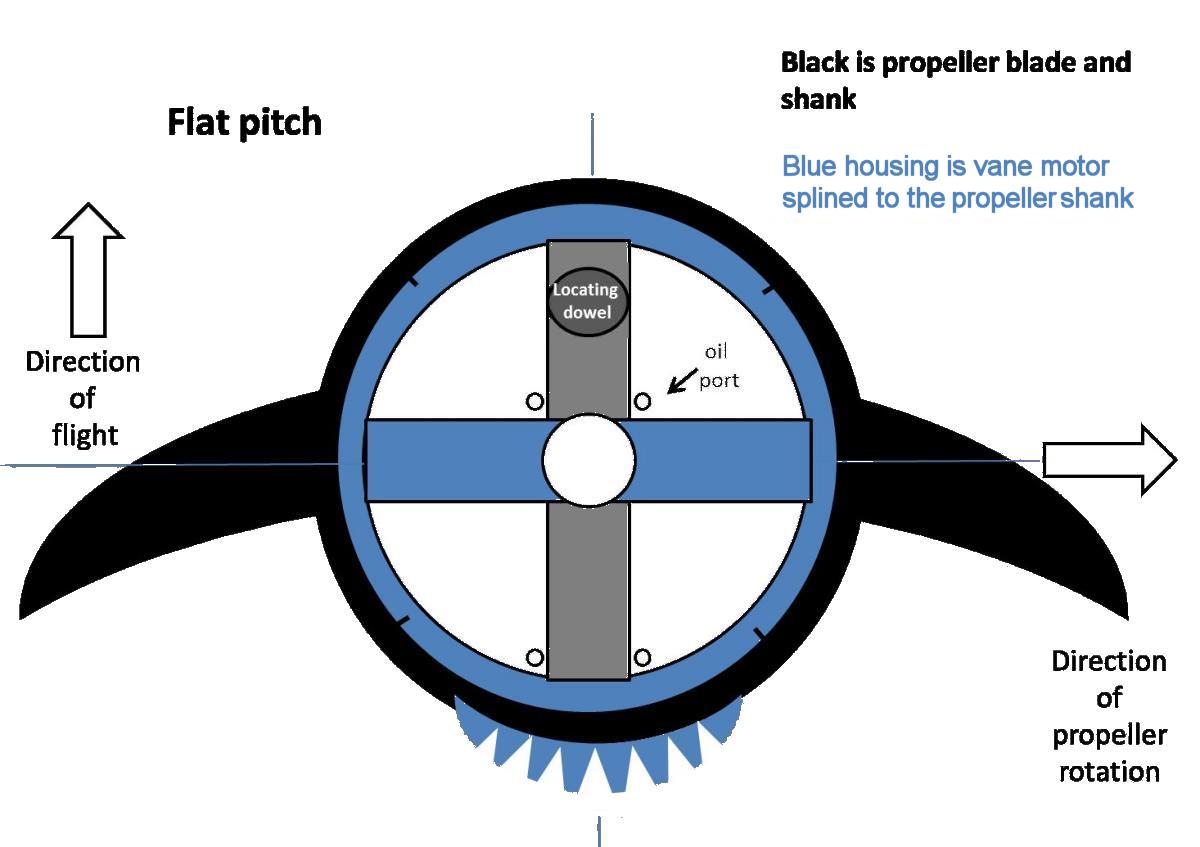
The hydraulic vane motor was a four chamber design and very similar to the central vane motor of the Canadian Hoover hydraulic propeller. The stationary "wall" indicated in gray was pegged to the hub via a dowel pin, and the moving rotor "walls" were affixed to the external vane motor housing (Fig. 15). As controlled by the pilot and follow up valves, two chambers were expanded with pressurized fluid while the other two chambers were vented, and this produced the rotation of the motor housing and propeller blades (Fig. 16). Seals were of an unknown design and material.
 |
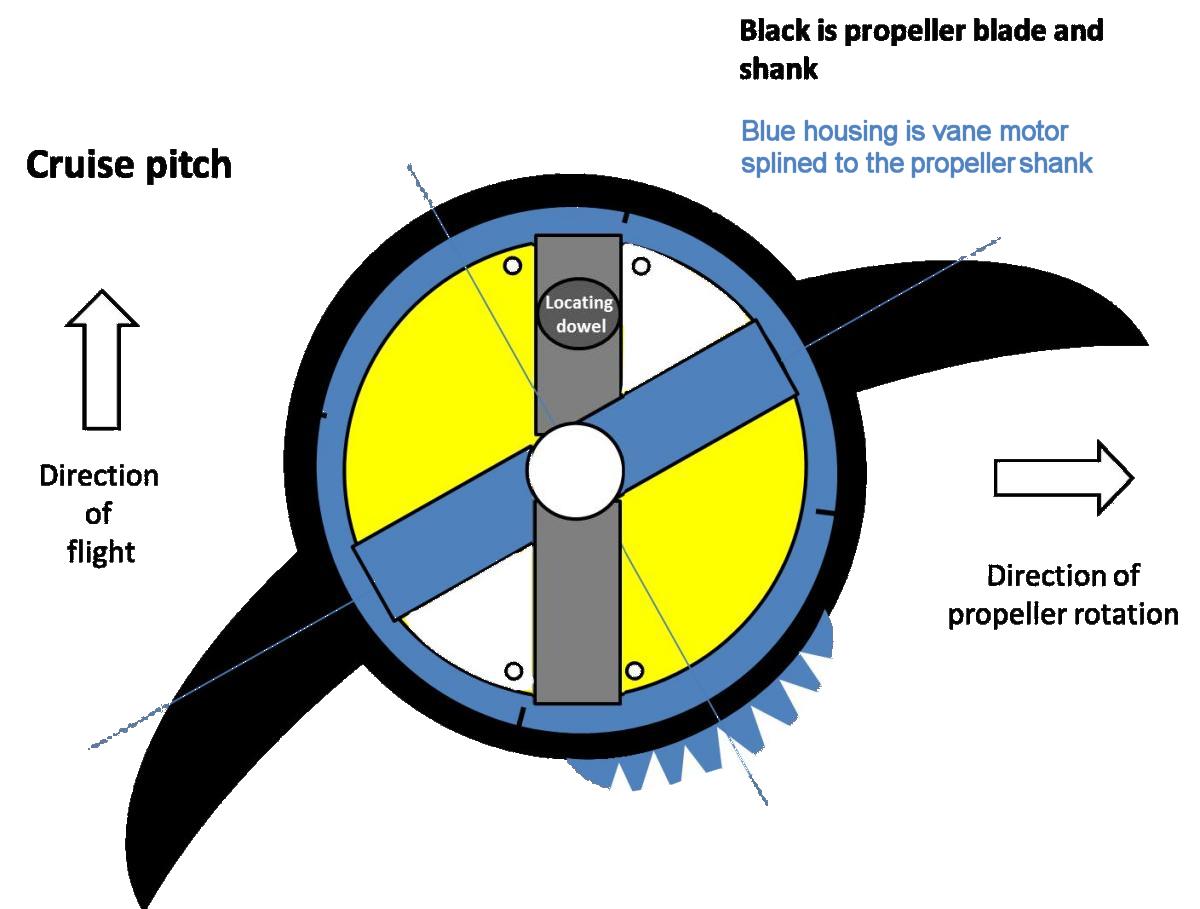 |
| Fig. 15. The vane motor situated in the base of the Super-Hydromatic propeller. The central gray "wall" component is secured to the hub by the locating dowel and does not rotate. | Fig. 16. The vane motor in the base of the Super-Hydromatic propeller after a pitch change has been commanded. The yellow quadrants have been filled with pressurized hydraulic fluid, turning the blade while the white quadrants are vented to the fluid sump. |
The single rotation Super-Hydromatic type 4260 passed its 110 hour type test in June of 1944. It was being test flown on a F4U-1 Corsair and F6F Hellcat during February 1946 when excessive loss of propeller hydraulic fluid to the engine nose case was noted and a seal was requested by the military. Hamilton Standard replied that such a seal would affect the fundamental design of the propeller, and that they were working on the problem.
 |
 |
 |
 |
 |
 |
| From U.S. National Archives Record Group 342, Engineering Division Propeller Laboratory Microfilmed Memorandum Report R101459 | ||
The Dual Rotation Super-Hydromatic Model 828060 Propeller
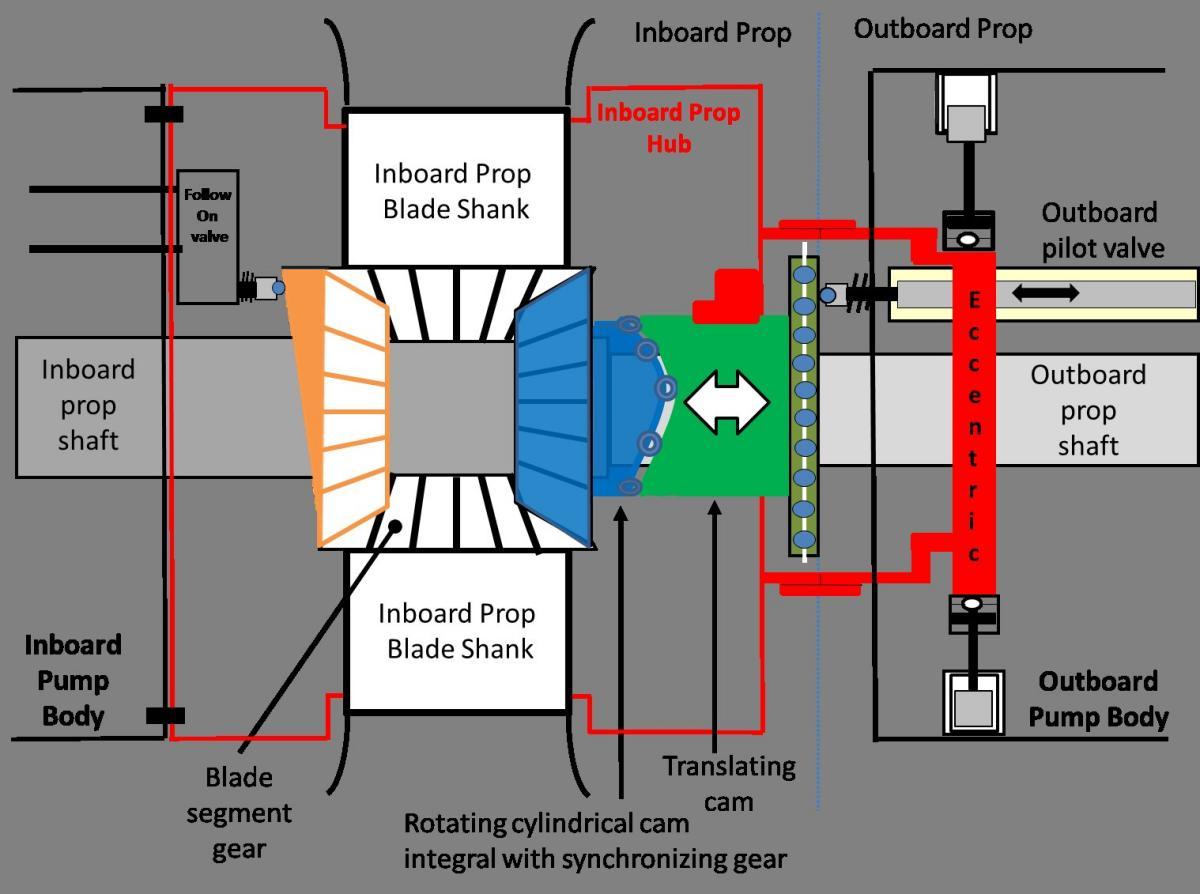 |
| Fig. 17. The abutting assemblies of the dual rotation Super-Hydromatic propeller. The inboard component is rotating in one direction, the outboard component in the opposite direction. The synchronizing gear of the inboard propeller drives the translating cam, generating an axial signal detected by the outboard pilot valve via the central translation bearing. The eccentric for the outboard hydraulic pump is fixated on the inboard propeller hub to drive the pump. |
The transmittance of the translational signal is essentially identical to the single rotation propeller. The cylindrical cam is integral with the synchronizing gear and the translating cam is splined to the inboard prop hub such that it rotates with the inboard propeller but is free to translate fore and aft between the propeller sets. The translating cam drives the translation bearing fore or aft, and the rolling element of outboard pilot valve rides on outboard face of the translation bearing.
The eccentric for the outboard hydraulic pump is attached directly to the pump body of the inboard propeller assembly. Because this fixation point is not actually fixed, but rotating in the opposite direction compared to the outboard components, the outboard pump components are likely scaled to deliver a similar volume and pressure as the inboard assembly even as they rotate at double the rotational velocity of the inboard pump.
As for unfeathering the outboard propeller, this is rapidly and automatically accomplished as soon as the inner pump body/propeller starts to rotate in response to the inboard unfeathering motor. The rotation of the inner pump body turns the outboard eccentric to the outboard hydraulic pump, thereby supplying pressurized fluid to rotate the blades to the commanded pitch.
The Dual Rotation Super-Hydromatic Propeller ‑ The Fedden Mission Drawing
As can be discerned from the Super-Hydromatic timeline, there was at least a decade of development that went into the propeller, and likely a number of substantive changes to the design as problems arose.
By late 1942 the Super-Hydromatic had been under development for at least three years. The drawing in the Fedden Mission to America Report (December 1942) shows what I speculate is an "early" version of the dual rotation propeller (Fig. 18). The mechanism for transmitting signals between the inboard and outboard components appears to be through the pilot valve via a translating flange between the propeller sets. The outboard pilot valve appears to be fixed to the translating flange while the extension of the inboard pilot valve rides on a shoe (in the opposing direction) engaged on the periphery of the translating flange. It is unclear how propeller blade position is communicated to the follow up and pilot valves, but the earlier schematics suffice for a basic understanding of the how the propeller operates.
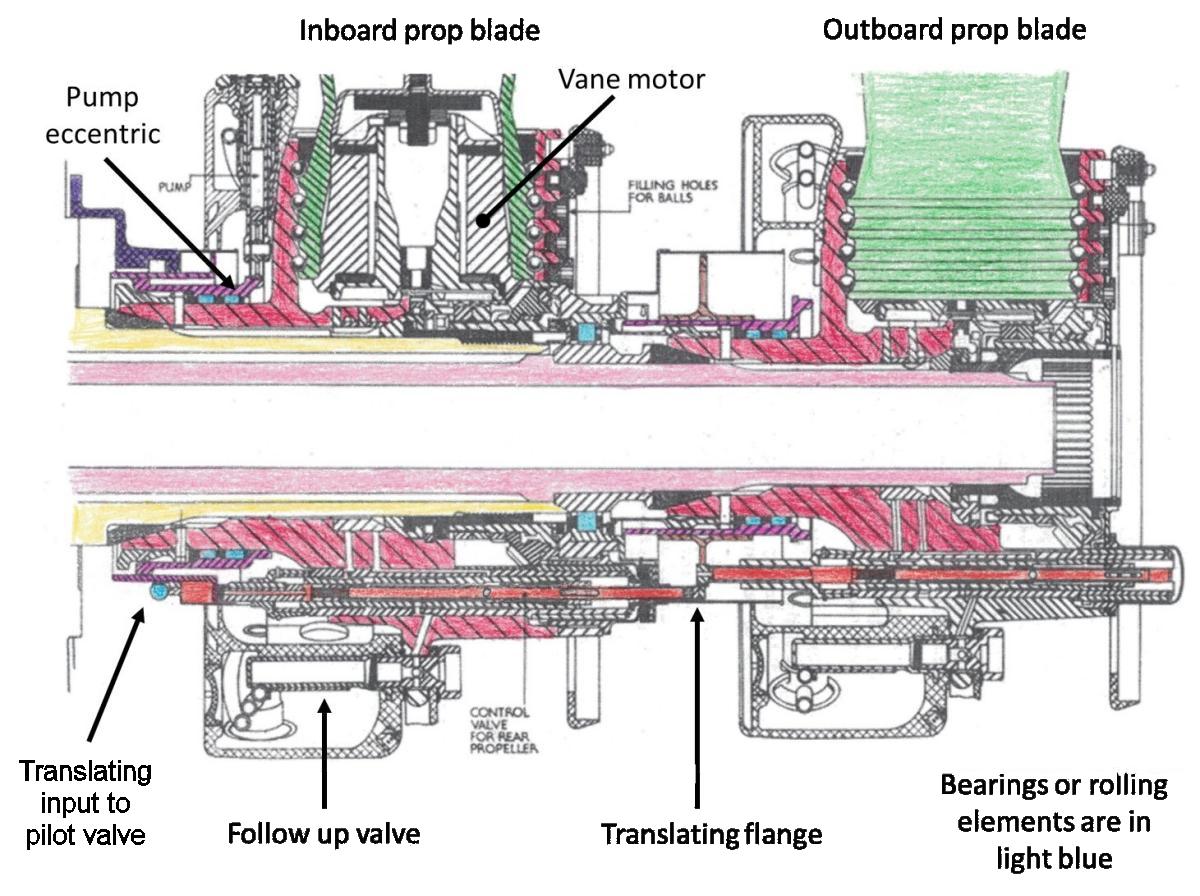 |
| Fig. 18. The Hamilton Standard Super-Hydromatic dual rotation propeller from the Fedden Mission to America report, Dec 1942. Of note are the gaps between the propeller shafts and the pump body as well as the gaps between the propeller shafts and the propeller hubs. These gaps functioned as galleries for the hydraulic fluid. |
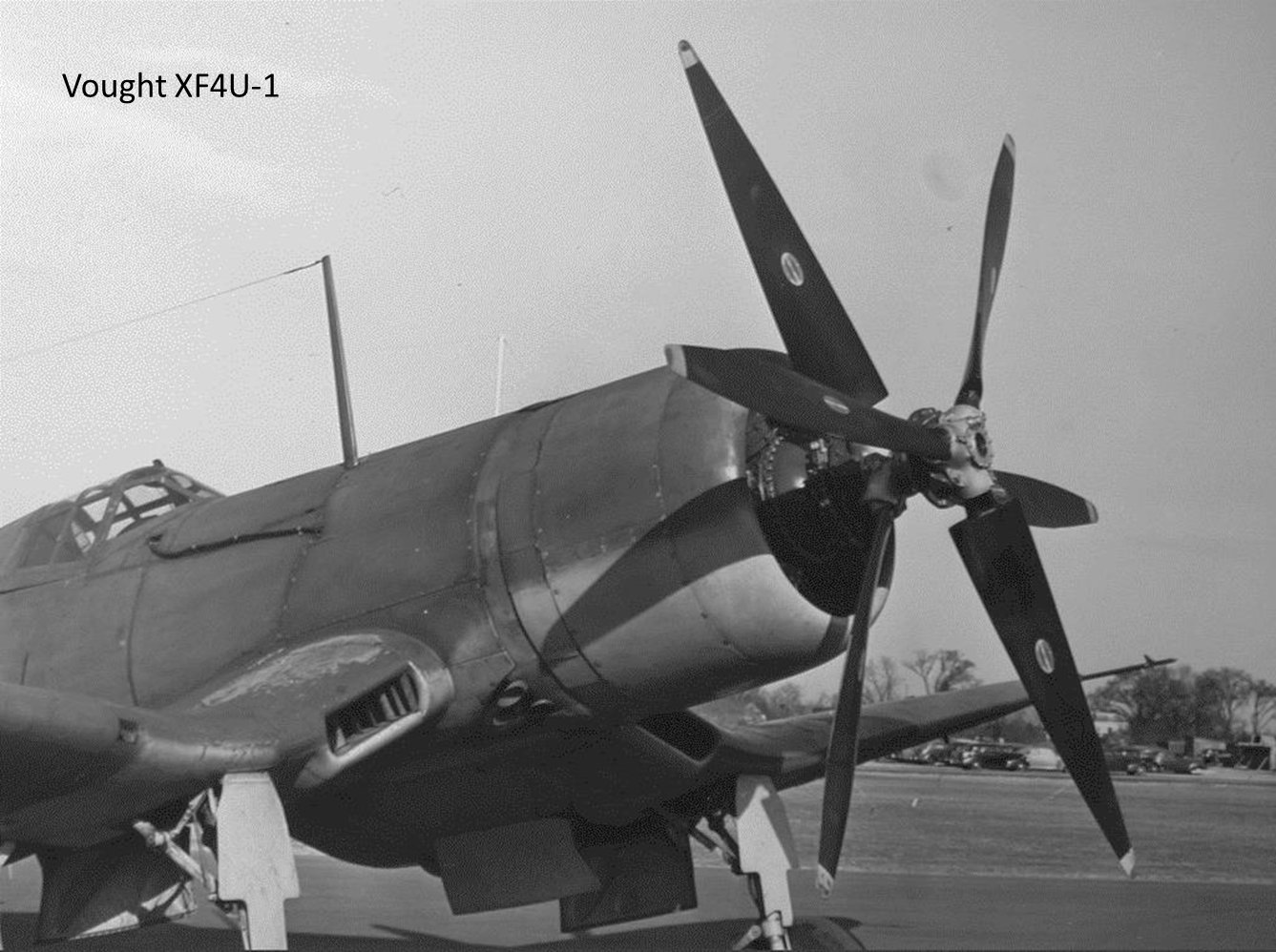
Looking at the photographs of the Super-Hydromatic dual rotation propellers on the B-23 test mule aircraft, the pump body configuration (pie tin shaped assemblies immediately behind the propeller hubs) is similar to those on the F4U-1 test aircraft (Fig. 19). There also appears to be a bell crank or control cable of some sort between the engine and the inboard component as shown on the F4U-1 photograph (Fig. 20). These "early?" units, albeit six bladed, appear to be quite different from the eight bladed Super-Hydromatics on the XTB2D-1 Skypirate and the XB-35 that feature larger, sculpted pump bodies (Figs. 21, 22).
Without drawings and data, it is difficult to determine the exact changes made to the Super-Hydromatics during development, but the timeline documents do indicate some of the problem areas and I encourage the reader to peruse the timeline.
 |
 |
 |
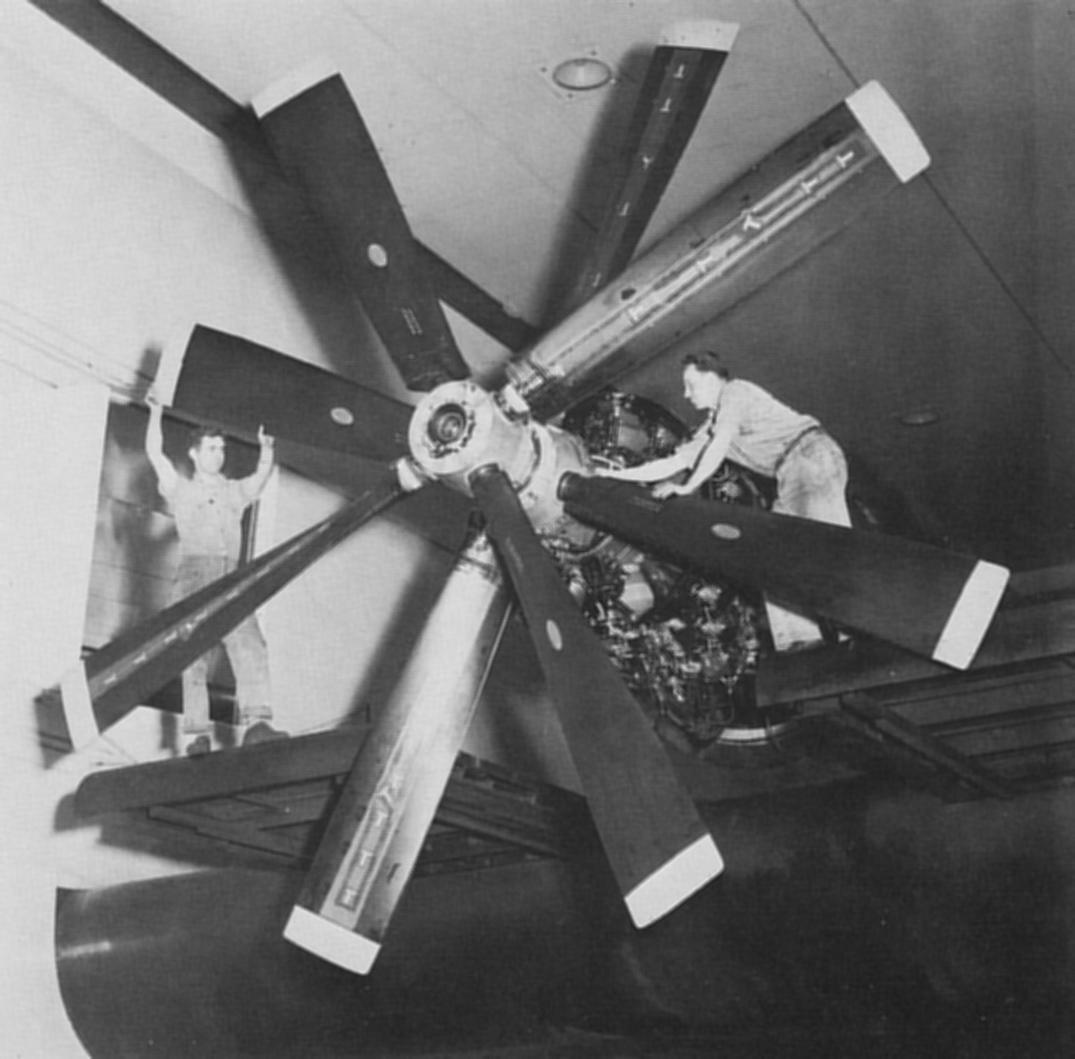 |
| Fig. 19. "Early" Model 624060-1 Super-Hydromatic dual rotation mounted on the Douglas B-23 test ship. Note the slender pump bodies and possible anti-rotation strut or control rod, extending from the upper engine nose case to the PCU. | Fig. 20. Six blade Model 624060 Super-Hydromatic dual rotation propeller on the Chance Vought XF4U-1A Corsair with dual-rotation nose case. Note the cable bundle running on the fuselage exterior between the engine accessory section and the cockpit. This is likely an "early" model Super-Hydromatic. | Fig. 21. Eight blade Model 828060 Super-Hydromatic dual rotation propeller on the Douglas XTB2D-1 Skypirate. The propeller hub and pump body design is quite different from that seen on the six blade Model 624060 Super-Hydromatic propeller | Fig. 22. Eight blade Super-Hydromatic in the test cell powered by an R-4360 engine. Two blades of each set are instrumented with strain gauge strips. Note the near constant chord and square tips of these blades. |
Send mail to
![]() with questions or comments about this web site.
with questions or comments about this web site.
![]()